| .. | ||
| model | ||
| runtime | ||
| scripts | ||
| utils | ||
| .gitignore | ||
| Dockerfile | ||
| LICENSE | ||
| main.py | ||
| README.md | ||
| requirements.txt | ||
| run_B0_multinode.sub | ||
| run_B4_multinode.sub | ||
EfficientNet For TensorFlow 2.4
This repository provides a script and recipe to train the EfficientNet model to achieve state-of-the-art accuracy. The content of the repository is tested and maintained by NVIDIA.
Table Of Contents
-
- Benchmarking
- Results
Model overview
EfficientNet TensorFlow 2 is a family of image classification models, which achieve state-of-the-art accuracy, yet being an order-of-magnitude smaller and faster than previous models. This model is based on EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. NVIDIA's implementation of EfficientNet TensorFlow 2 is an optimized version of TensorFlow Model Garden implementation, leveraging mixed precision arithmetic on Volta, Turing, and the NVIDIA Ampere GPU architectures for faster training times while maintaining target accuracy.
The major differences between the original implementation of the paper and this version of EfficientNet are as follows:
- Automatic mixed precision (AMP) training support
- Cosine LR decay for better accuracy
- Weight initialization using
fan_outfor better accuracy - Multi-node training support
- XLA enabled for better performance
- Lightweight logging using dllogger
Other publicly available implementations of EfficientNet include:
This model is trained with mixed precision Tensor Cores on Volta, Turing, and the NVIDIA Ampere GPU architectures. It provides a push-button solution to pretraining on a corpus of choice. As a result, researchers can get results 1.5x faster than training without Tensor Cores, while experiencing the benefits of mixed precision training. This model is tested against each NGC monthly released container to ensure consistent accuracy and performance over time.
Model architecture
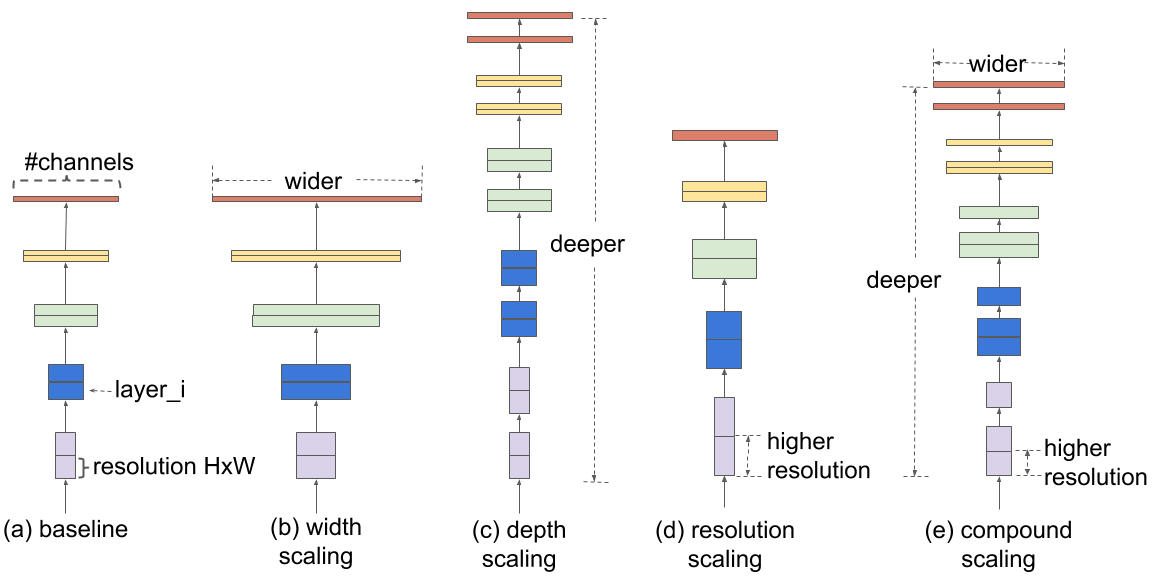
EfficientNets are developed based on AutoML and Compound Scaling. In particular, a mobile-size baseline network called EfficientNet-B0 is developed from AutoML MNAS Mobile framework, the building block is mobile inverted bottleneck MBConv with squeeze-and-excitation optimization. Then, through a compound scaling method, this baseline is scaled up to obtain EfficientNet-B1 to B7.
Default configuration
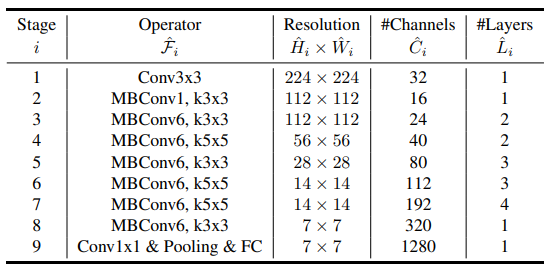
Here is the Baseline EfficientNet-B0 structure.
The following features were implemented in this model:
-
General:
- XLA support
- Mixed precision support
- Multi-GPU support using Horovod
- Multi-node support using Horovod
- Cosine LR Decay
-
Inference:
- Support for inference on single image is included
- Support for inference on batch of images is included
Feature support matrix
The following features are supported by this model:
| Feature | EfficientNet |
|---|---|
| Horovod Multi-GPU training (NCCL) | Yes |
| Multi-node training | Yes |
| Automatic mixed precision (AMP) | Yes |
| XLA | Yes |
Features
Multi-GPU training with Horovod
Our model uses Horovod to implement efficient multi-GPU training with NCCL. For details, see example sources in this repository or see the TensorFlow tutorial.
Multi-node training with Horovod
Our model also uses Horovod to implement efficient multi-node training.
Automatic Mixed Precision (AMP)
Computation graphs can be modified by TensorFlow on runtime to support mixed precision training. Detailed explanation of mixed precision can be found in the next section.
Mixed precision training
Mixed precision is the combined use of different numerical precisions in a computational method. Mixed precision training offers significant computational speedup by performing operations in half-precision format while storing minimal information in single-precision to retain as much information as possible in critical parts of the network. Since the introduction of Tensor Cores in Volta, and following with both the Turing and Ampere architectures, significant training speedups are experienced by switching to mixed precision -- up to 3x overall speedup on the most arithmetically intense model architectures. Using mixed precision training previously required two steps:
- Porting the model to use the FP16 data type where appropriate.
- Adding loss scaling to preserve small gradient values.
This can now be achieved using Automatic Mixed Precision (AMP) for TensorFlow to enable the full mixed precision methodology in your existing TensorFlow model code. AMP enables mixed precision training on Volta, Turing, and NVIDIA Ampere GPU architectures automatically. The TensorFlow framework code makes all necessary model changes internally.
In TF-AMP, the computational graph is optimized to use as few casts as necessary and maximize the use of FP16, and the loss scaling is automatically applied inside of supported optimizers. AMP can be configured to work with the existing tf.contrib loss scaling manager by disabling the AMP scaling with a single environment variable to perform only the automatic mixed-precision optimization. It accomplishes this by automatically rewriting all computation graphs with the necessary operations to enable mixed precision training and automatic loss scaling.
For information about:
- How to train using mixed precision, see the Mixed Precision Training paper and Training With Mixed Precision documentation.
- Techniques used for mixed precision training, see the Mixed-Precision Training of Deep Neural Networks blog.
- How to access and enable AMP for TensorFlow, see Using TF-AMP from the TensorFlow User Guide.
Enabling mixed precision
Mixed precision is enabled in TensorFlow by using the Automatic Mixed Precision (TF-AMP) extension which casts variables to half-precision upon retrieval, while storing variables in single-precision format. Furthermore, to preserve small gradient magnitudes in backpropagation, a loss scaling step must be included when applying gradients. In TensorFlow, loss scaling can be applied statically by using simple multiplication of loss by a constant value or automatically, by TF-AMP. Automatic mixed precision makes all the adjustments internally in TensorFlow, providing two benefits over manual operations. First, programmers need not modify network model code, reducing development and maintenance effort. Second, using AMP maintains forward and backward compatibility with all the APIs for defining and running TensorFlow models.
To enable mixed precision, you can simply add the --use_amp to the command-line used to run the model. This will enable the following code:
if params.use_amp:
policy = tf.keras.mixed_precision.experimental.Policy('mixed_float16', loss_scale='dynamic')
tf.keras.mixed_precision.experimental.set_policy(policy)
Enabling TF32
TensorFloat-32 (TF32) is the new math mode in NVIDIA A100 GPUs for handling the matrix math also called tensor operations. TF32 running on Tensor Cores in A100 GPUs can provide up to 10x speedups compared to single-precision floating-point math (FP32) on Volta GPUs.
TF32 Tensor Cores can speed up networks using FP32, typically with no loss of accuracy. It is more robust than FP16 for models which require high dynamic range for weights or activations.
For more information, refer to the TensorFloat-32 in the A100 GPU Accelerates AI Training, HPC up to 20x blog post.
TF32 is supported in the NVIDIA Ampere GPU architecture and is enabled by default.
Setup
The following section lists the requirements that you need to meet in order to start training the EfficientNet model.
Requirements
This repository contains Dockerfile which extends the TensorFlow NGC container and encapsulates some dependencies. Aside from these dependencies, ensure you have the following components:
- NVIDIA Docker
- [TensorFlow 20.08-py3] NGC container or later
- Supported GPUs:
For more information about how to get started with NGC containers, see the following sections from the NVIDIA GPU Cloud Documentation and the Deep Learning Documentation:
- Getting Started Using NVIDIA GPU Cloud
- Accessing And Pulling From The NGC Container Registry
- Running TensorFlow
As an alternative to the use of the Tensorflow2 NGC container, to set up the required environment or create your own container, see the versioned NVIDIA Container Support Matrix.
For multi-node, the sample provided in this repository requires Enroot and Pyxis set up on a SLURM cluster.
Quick Start Guide
To train your model using mixed or TF32 precision with Tensor Cores or using FP32, perform the following steps using the default parameters of the EfficientNet model on the ImageNet dataset. For the specifics concerning training and inference, see the Advanced section.
-
Clone the repository.
git clone https://github.com/NVIDIA/DeepLearningExamples.git cd DeepLearningExamples/TensorFlow2/Classification/ConvNets/efficientnet -
Download and prepare the dataset.
Runner.pysupports ImageNet with TensorFlow Datasets (TFDS). Refer to the TFDS ImageNet readme for manual download instructions. -
Build EfficientNet on top of the NGC container.
bash ./scripts/docker/build.sh -
Start an interactive session in the NGC container to run training/inference.
bash ./scripts/docker/launch.sh -
Start training.
To run training for a standard configuration (DGX A100/DGX-1 V100, AMP/TF32/FP32, 500 Epochs, efficientnet-b0/efficientnet-b4), run one of the scripts in the
./scripts/{B0, B4}/trainingdirectory called./scripts/{B0, B4}/training/{AMP, TF32, FP32}/convergence_8x{A100-80G, V100-16G, V100-32G}.sh. Ensure ImageNet is mounted in the/datadirectory. For example:bash ./scripts/B0/AMP/convergence_8xA100-80G.sh -
Start validation/evaluation.
To run validation/evaluation for a standard configuration (DGX A100/DGX-1 V100, AMP/TF32/FP32, efficientnet-b0/efficientnet-b4), run one of the scripts in the
./scripts/{B0, B4}/evaluationdirectory called./scripts/{B0, B4}/evaluation/evaluation_{AMP, FP32, TF32}_8x{A100-80G, V100-16G, V100-32G}.sh. Ensure ImageNet is mounted in the/datadirectory. (Optional) Place the checkpoint in the--model_dirlocation to evaluate on a checkpoint. For example:bash ./scripts/B0/evaluation/evaluation_AMP_8xA100-80G.sh -
Start inference/predictions.
To run inference for a standard configuration (DGX A100/DGX-1 V100, AMP/TF32/FP32, efficientnet-b0/efficientnet-b4, batch size 8), run one of the scripts in the
./scripts/{B0, B4}/inferencedirectory called./scripts/{B0, B4}/inference/inference_{AMP, FP32, TF32}.sh. Ensure your JPEG images to be ran inference on are mounted in the/infer_datadirectory with this folder structure :infer_data | ├── images | | ├── image1.JPEG | | ├── image2.JPEG(Optional) Place the checkpoint in the
--model_dirlocation to evaluate on a checkpoint. For example:bash ./scripts/B0/inference/inference_{AMP, FP32}.sh
Now that you have your model trained and evaluated, you can choose to compare your training results with our Training accuracy results. You can also choose to benchmark yours performance to Training performance benchmark, or Inference performance benchmark. Following the steps in these sections will ensure that you achieve the same accuracy and performance results as stated in the Results section.
Advanced
The following sections provide greater details of the dataset, running training and inference, and the training results.
Scripts and sample code
The following lists the content for each folder:
scripts/- shell scripts to build and launch EfficientNet container on top of NGC container, and scripts to launch training, evaluation and inferencemodel/- building blocks and EfficientNet model definitionsruntime/- detailed procedure for each running modeutils/- support util functions forrunner.py
Parameters
Important parameters for training are listed below with default values.
mode(train_and_eval,train,eval,prediction) - the default istrain_and_eval.arch- the default isefficientnet-b0model_dir- The folder where model checkpoints are saved (the default is/workspace/output)data_dir- The folder where data resides (the default is/data/)augmenter_name- Type of Augmentation (the default isautoaugment)max_epochs- The number of training epochs (the default is300)warmup_epochs- The number of epochs of warmup (the default is5)train_batch_size- The training batch size per GPU (the default is32)eval_batch_size- The evaluation batch size per GPU (the default is32)lr_init- The learning rate for a batch size of 128, effective learning rate will be automatically scaled according to the global training batch size (the default is0.008)
The main script main.py specific parameters are:
--model_dir MODEL_DIR
The directory where the model and training/evaluation
summariesare stored.
--save_checkpoint_freq SAVE_CHECKPOINT_FREQ
Number of epochs to save checkpoint.
--data_dir DATA_DIR The location of the input data. Files should be named
`train-*` and `validation-*`.
--mode MODE Mode to run: `train`, `eval`, `train_and_eval`, `predict` or
`export`.
--arch ARCH The type of the model, e.g. EfficientNet, etc.
--dataset DATASET The name of the dataset, e.g. ImageNet, etc.
--log_steps LOG_STEPS
The interval of steps between logging of batch level
stats.
--use_xla Set to True to enable XLA
--use_amp Set to True to enable AMP
--num_classes NUM_CLASSES
Number of classes to train on.
--batch_norm BATCH_NORM
Type of Batch norm used.
--activation ACTIVATION
Type of activation to be used.
--optimizer OPTIMIZER
Optimizer to be used.
--moving_average_decay MOVING_AVERAGE_DECAY
The value of moving average.
--label_smoothing LABEL_SMOOTHING
The value of label smoothing.
--max_epochs MAX_EPOCHS
Number of epochs to train.
--num_epochs_between_eval NUM_EPOCHS_BETWEEN_EVAL
Eval after how many steps of training.
--steps_per_epoch STEPS_PER_EPOCH
Number of steps of training.
--warmup_epochs WARMUP_EPOCHS
Number of steps considered as warmup and not taken
into account for performance measurements.
--lr_init LR_INIT Initial value for the learning rate.
--lr_decay LR_DECAY Type of LR Decay.
--lr_decay_rate LR_DECAY_RATE
LR Decay rate.
--lr_decay_epochs LR_DECAY_EPOCHS
LR Decay epoch.
--weight_decay WEIGHT_DECAY
Weight Decay scale factor.
--weight_init {fan_in,fan_out}
Model weight initialization method.
--train_batch_size TRAIN_BATCH_SIZE
Training batch size per GPU.
--augmenter_name AUGMENTER_NAME
Type of Augmentation during preprocessing only during
training.
--eval_batch_size EVAL_BATCH_SIZE
Evaluation batch size per GPU.
--resume_checkpoint Resume from a checkpoint in the model_dir.
--use_dali Use dali for data loading and preprocessing of train
dataset.
--use_dali_eval Use dali for data loading and preprocessing of eval
dataset.
--dtype DTYPE Only permitted
`float32`,`bfloat16`,`float16`,`fp32`,`bf16`
Command-line options
To see the full list of available options and their descriptions, use the -h or --help command-line option, for example:
python main.py --help
Getting the data
Refer to the TFDS ImageNet readme for manual download instructions.
To train on ImageNet dataset, pass $path_to_ImageNet_tfrecords to $data_dir in the command-line.
Name the TFRecords in the following scheme:
- Training images -
/data/train-* - Validation images -
/data/validation-*
Training process
The training process can start from scratch, or resume from a checkpoint.
By default, bash script scripts/{B0, B4}/training/{AMP, FP32, TF32}/convergence_8x{A100-80G, V100-16G, V100-32G}.sh will start the training process from scratch with the following settings.
- Use 8 GPUs by Horovod
- Has XLA enabled
- Saves checkpoints after every 5 epochs to
/workspace/output/folder - AMP or FP32 or TF32 based on the folder
scripts/{B0, B4}/training/{AMP, FP32, TF32}
To resume from a checkpoint, include --resume_checkpoint in the command-line and place the checkpoint into --model_dir.
Multi-node
Multi-node runs can be launched on a Pyxis/enroot Slurm cluster (see Requirements) with the run_{B0, B4}_multinode.sub script with the following command for a 4-node NVIDIA DGX A100 example:
PARTITION=<partition_name> sbatch N 4 --ntasks-per-node=8 run_B0_multinode.sub
PARTITION=<partition_name> sbatch N 4 --ntasks-per-node=8 run_B4_multinode.sub
Checkpoint after --save_checkpoint_freq epochs will be saved in checkpointdir. The checkpoint will be automatically picked up to resume training in case it needs to be resumed. Cluster partition name has to be provided <partition_name>.
Note that the run_{B0, B4}_multinode.sub script is a starting point that has to be adapted depending on the environment. In particular, variables such as --container-image handle the container image to train using and --datadir handle the location of the ImageNet data.
Refer to the files contents to see the full list of variables to adjust for your system.
Inference process
Validation is done every epoch and can be also run separately on a checkpointed model.
bash ./scripts/{B0, B4}/evaluation/evaluation_{AMP, FP32, TF32}_8x{A100-80G, V100-16G, V100-32G}.sh
Metrics gathered through this process are as follows:
- eval_loss
- eval_accuracy_top_1
- eval_accuracy_top_5
- avg_exp_per_second_eval
- avg_exp_per_second_eval_per_GPU
- avg_time_per_exp_eval : Average Latency
- latency_90pct : 90% Latency
- latency_95pct : 95% Latency
- latency_99pct : 99% Latency
To run inference on a JPEG image, you have to first store the checkpoint in the --model_dir and store the JPEG images in the following directory structure:
```
infer_data
| ├── images
| | ├── image1.JPEG
| | ├── image2.JPEG
```
Run:
bash ./scripts/{B0, B4}/inference/inference_{AMP, FP32, TF32}.sh
Performance
The performance measurements in this document were conducted at the time of publication and may not reflect the performance achieved from NVIDIA’s latest software release. For the most up-to-date performance measurements, go to NVIDIA Data Center Deep Learning Product Performance.
Benchmarking
The following section shows how to run benchmarks measuring the model performance in training and inference modes.
Training performance benchmark
Training benchmark for EfficientNet-B0 was run on NVIDIA DGX A100 80GB and NVIDIA DGX-1 V100 16GB.
To benchmark training performance with other parameters, run:
bash ./scripts/B0/training/{AMP, FP32, TF32}/train_benchmark_8x{A100-80G, V100-16G}.sh
Training benchmark for EfficientNet-B4 was run on NVIDIA DGX A100- 80GB and NVIDIA DGX-1 V100 32GB.
bash ./scripts/B4/training/{AMP, FP32, TF32}/train_benchmark_8x{A100-80G, V100-16G}.sh
Inference performance benchmark
Inference benchmark for EfficientNet-B0 was run on NVIDIA DGX A100- 80GB and NVIDIA DGX-1 V100 16GB.
Inference benchmark for EfficientNet-B4 was run on NVIDIA DGX A100- 80GB and NVIDIA DGX-1 V100 32GB.
Results
The following sections provide details on how we achieved our performance and accuracy in training and inference.
Training accuracy results for EfficientNet-B0
Training accuracy: NVIDIA DGX A100 (8x A100 80GB)
Our results were obtained by running the training scripts in the tensorflow:21.02-tf2-py3 NGC container on NVIDIA DGX A100 (8x A100 80GB) GPUs.
| GPUs | Accuracy - TF32 | Accuracy - mixed precision | Time to train - TF32 | Time to train - mixed precision | Time to train speedup (TF32 to mixed precision) |
|---|---|---|---|---|---|
| 8 | 77.38 | 77.43 | 19 | 10.5 | 1.8 |
| 16 | 77.46 | 77.62 | 10 | 5.5 | 1.81 |
Training accuracy: NVIDIA DGX-1 (8x V100 16GB)
Our results were obtained by running the training scripts in the tensorflow:21.02-tf2-py3 NGC container on NVIDIA DGX-1 (8x V100 16GB) GPUs.
| GPUs | Accuracy - FP32 | Accuracy - mixed precision | Time to train - FP32 | Time to train - mixed precision | Time to train speedup (FP32 to mixed precision) |
|---|---|---|---|---|---|
| 8 | 77.54 | 77.51 | 48 | 44 | 1.09 |
| 32 | 77.38 | 77.62 | 11.48 | 11.44 | 1.003 |
Training accuracy results for EfficientNet-B4
Training accuracy: NVIDIA DGX A100 (8x A100 80GB)
Our results were obtained by running the training scripts in the tensorflow:21.02-tf2-py3 NGC container on multi-node NVIDIA DGX A100 (8x A100 80GB) GPUs.
| GPUs | Accuracy - TF32 | Accuracy - mixed precision | Time to train - TF32 | Time to train - mixed precision | Time to train speedup (TF32 to mixed precision) |
|---|---|---|---|---|---|
| 32 | 82.69 | 82.69 | 38 | 17.5 | 2.17 |
| 64 | 82.75 | 82.78 | 18 | 8.5 | 2.11 |
Training accuracy: NVIDIA DGX-1 (8x V100 32GB)
Our results were obtained by running the training scripts in the tensorflow:21.02-tf2-py3 NGC container on multi-node NVIDIA DGX-1 (8x V100 32GB) GPUs.
| GPUs | Accuracy - FP32 | Accuracy - mixed precision | Time to train - FP32 | Time to train - mixed precision | Time to train speedup (FP32 to mixed precision) |
|---|---|---|---|---|---|
| 32 | 82.78 | 82.78 | 95 | 39.5 | 2.40 |
| 64 | 82.74 | 82.74 | 53 | 19 | 2.78 |
Training performance results for EfficientNet-B0
Training performance: NVIDIA DGX A100 (8x A100 80GB)
Our results were obtained by running the training benchmark script in the tensorflow:21.02-tf2-py3 NGC container on NVIDIA DGX A100 (8x A100 80GB) GPUs. Performance numbers (in items/images per second) were averaged over 5 entire training epoch.
| GPUs | Throughput - TF32 | Throughput - mixed precision | Throughput speedup (TF32 - mixed precision) | Weak scaling - TF32 | Weak scaling - mixed precision |
|---|---|---|---|---|---|
| 1 | 1206 | 2549 | 2.11 | 1 | 1 |
| 8 | 9365 | 16336 | 1.74 | 7.76 | 6.41 |
| 16 | 18361 | 33000 | 1.79 | 15.223 | 12.95 |
To achieve these same results, follow the steps in the Quick Start Guide.
Training performance: NVIDIA DGX-1 (8x V100 16GB)
Our results were obtained by running the training benchmark script in the tensorflow:21.02-tf2-py3 NGC container on NVIDIA DGX-1 (8x V100 16GB) GPUs. Performance numbers (in items/images per second) were averaged over an entire training epoch.
| GPUs | Throughput - FP32 | Throughput - mixed precision | Throughput speedup (FP32 - mixed precision) | Weak scaling - FP32 | Weak scaling - mixed precision |
|---|---|---|---|---|---|
| 1 | 629 | 712 | 1.13 | 1 | 1 |
| 8 | 4012 | 4065 | 1.01 | 6.38 | 5.71 |
To achieve these same results, follow the steps in the Quick Start Guide.
Training performance results for EfficientNet-B4
Training performance: NVIDIA DGX A100 (8x A100 80GB)
Our results were obtained by running the training benchmark script in the tensorflow:21.02-tf2-py3 NGC container on NVIDIA DGX A100 (8x A100 80GB) GPUs. Performance numbers (in items/images per second) were averaged over 5 entire training epoch.
| GPUs | Throughput - TF32 | Throughput - mixed precision | Throughput speedup (TF32 - mixed precision) | Weak scaling - TF32 | Weak scaling - mixed precision |
|---|---|---|---|---|---|
| 1 | 167 | 394 | 2.34 | 1 | 1 |
| 8 | 1280 | 2984 | 2.33 | 7.66 | 7.57 |
| 32 | 5023 | 11034 | 2.19 | 30.07 | 28.01 |
| 64 | 9838 | 21844 | 2.22 | 58.91 | 55.44 |
To achieve these same results, follow the steps in the Quick Start Guide.
Training performance: NVIDIA DGX-1 (8x V100 32GB)
Our results were obtained by running the training benchmark script in the tensorflow:21.02-tf2-py3 NGC container on NVIDIA DGX-1 (8x V100 16GB) GPUs. Performance numbers (in items/images per second) were averaged over an entire training epoch.
| GPUs | Throughput - FP32 | Throughput - mixed precision | Throughput speedup (FP32 - mixed precision) | Weak scaling - FP32 | Weak scaling - mixed precision |
|---|---|---|---|---|---|
| 1 | 89 | 193 | 2.16 | 1 | 1 |
| 8 | 643 | 1298 | 2.00 | 7.28 | 6.73 |
| 32 | 2095 | 4892 | 2.33 | 23.54 | 25.35 |
| 64 | 4109 | 9666 | 2.35 | 46.17 | 50.08 |
To achieve these same results, follow the steps in the Quick Start Guide.
Inference performance results for EfficientNet-B0
Inference performance: NVIDIA DGX A100 (1x A100 80GB)
Our results were obtained by running the inferencing benchmarking script in the tensorflow:21.02-tf2-py3 NGC container on NVIDIA DGX A100 (1x A100 80GB) GPU.
FP16 Inference Latency
| Batch size | Resolution | Throughput Avg | Latency Avg (ms) | Latency 90% (ms) | Latency 95% (ms) | Latency 99% (ms) |
|---|---|---|---|---|---|---|
| 1 | 224x224 | 111 | 8.97 | 8.88 | 8.92 | 8.96 |
| 2 | 224x224 | 233 | 8.56 | 8.44 | 8.5 | 8.54 |
| 4 | 224x224 | 432 | 9.24 | 9.12 | 9.16 | 9.2 |
| 8 | 224x224 | 771 | 10.32 | 10.16 | 10.24 | 10.24 |
| 1024 | 224x224 | 10269 | 102.4 | 102.4 | 102.4 | 102.4 |
TF32 Inference Latency
| Batch size | Resolution | Throughput Avg | Latency Avg (ms) | Latency 90% (ms) | Latency 95% (ms) | Latency 99% (ms) |
|---|---|---|---|---|---|---|
| 1 | 224x224 | 101 | 9.87 | 9.78 | 9.82 | 9.86 |
| 2 | 224x224 | 204 | 9.78 | 9.66 | 9.7 | 9.76 |
| 4 | 224x224 | 381 | 10.48 | 10.36 | 10.4 | 10.44 |
| 8 | 224x224 | 584 | 13.68 | 13.52 | 13.6 | 13.68 |
| 512 | 224x224 | 5480 | 92.16 | 92.16 | 92.16 | 92.16 |
To achieve these same results, follow the steps in the Quick Start Guide.
Inference performance: NVIDIA DGX-1 (1x V100 16GB)
Our results were obtained by running the inference-script-name.sh inferencing benchmarking script in the TensorFlow NGC container on NVIDIA DGX-1 (1x V100 16GB) GPU.
FP16 Inference Latency
| Batch size | Resolution | Throughput Avg | Latency Avg (ms) | Latency 90% (ms) | Latency 95% (ms) | Latency 99% (ms) |
|---|---|---|---|---|---|---|
| 1 | 224x224 | 98.8 | 10.12 | 10.03 | 10.06 | 10.10 |
| 2 | 224x224 | 199.3 | 10.02 | 9.9 | 9.94 | 10.0 |
| 4 | 224x224 | 382.5 | 10.44 | 10.28 | 10.36 | 10.4 |
| 8 | 224x224 | 681.2 | 11.68 | 11.52 | 11.6 | 11.68 |
| 256 | 224x224 | 5271 | 48.64 | 46.08 | 46.08 | 48.64 |
| FP32 Inference Latency |
| Batch size | Resolution | Throughput Avg | Latency Avg (ms) | Latency 90% (ms) | Latency 95% (ms) | Latency 99% (ms) |
|---|---|---|---|---|---|---|
| 1 | 224x224 | 68.39 | 14.62 | 14.45 | 14.51 | 14.56 |
| 2 | 224x224 | 125.62 | 15.92 | 15.78 | 15.82 | 15.82 |
| 4 | 224x224 | 216.41 | 18.48 | 18.24 | 18.4 | 18.44 |
| 8 | 224x224 | 401.60 | 19.92 | 19.6 | 19.76 | 19.84 |
| 128 | 224x224 | 2713 | 47.36 | 46.08 | 46.08 | 47.36 |
To achieve these same results, follow the steps in the Quick Start Guide.
Inference performance results for EfficientNet-B4
Inference performance: NVIDIA DGX A100 (1x A100 80GB)
Our results were obtained by running the inferencing benchmarking script in the tensorflow:21.02-tf2-py3 NGC container on NVIDIA DGX A100 (1x A100 80GB) GPU.
FP16 Inference Latency
| Batch size | Resolution | Throughput Avg | Latency Avg (ms) | Latency 90% (ms) | Latency 95% (ms) | Latency 99% (ms) |
|---|---|---|---|---|---|---|
| 1 | 380x380 | 57.54 | 17.37 | 17.24 | 17.30 | 17.35 |
| 2 | 380x380 | 112.06 | 17.84 | 17.7 | 17.76 | 17.82 |
| 4 | 380x380 | 219.71 | 18.2 | 18.08 | 18.12 | 18.16 |
| 8 | 380x380 | 383.39 | 20.8 | 20.64 | 20.72 | 20.8 |
| 128 | 380x380 | 1470 | 87.04 | 85.76 | 85.76 | 87.04 |
TF32 Inference Latency
| Batch size | Resolution | Throughput Avg | Latency Avg (ms) | Latency 90% (ms) | Latency 95% (ms) | Latency 99% (ms) |
|---|---|---|---|---|---|---|
| 1 | 380x380 | 52.68 | 18.98 | 18.86 | 18.91 | 18.96 |
| 2 | 380x380 | 95.32 | 20.98 | 20.84 | 20.9 | 20.96 |
| 4 | 380x380 | 182.14 | 21.96 | 21.84 | 21.88 | 21.92 |
| 8 | 380x380 | 325.72 | 24.56 | 24.4 | 24.4 | 24.48 |
| 64 | 380x380 | 694 | 91.52 | 90.88 | 91.52 | 91.52 |
To achieve these same results, follow the steps in the Quick Start Guide.
Inference performance: NVIDIA DGX-1 (1x V100 32GB)
Our results were obtained by running the inference-script-name.sh inferencing benchmarking script in the TensorFlow NGC container on NVIDIA DGX-1 (1x V100 16GB) GPU.
FP16 Inference Latency
| Batch size | Resolution | Throughput Avg | Latency Avg (ms) | Latency 90% (ms) | Latency 95% (ms) | Latency 99% (ms) |
|---|---|---|---|---|---|---|
| 1 | 380x380 | 54.27 | 18.35 | 18.20 | 18.25 | 18.32 |
| 2 | 380x380 | 104.27 | 19.18 | 19.02 | 19.08 | 19.16 |
| 4 | 380x380 | 182.61 | 21.88 | 21.64 | 21.72 | 21.84 |
| 8 | 380x380 | 234.06 | 34.16 | 33.92 | 34.0 | 34.08 |
| 64 | 380x380 | 782.47 | 81.92 | 80.0 | 80.64 | 81.28 |
FP32 Inference Latency
| Batch size | Resolution | Throughput Avg | Latency Avg (ms) | Latency 90% (ms) | Latency 95% (ms) | Latency 99% (ms) |
|---|---|---|---|---|---|---|
| 1 | 380x380 | 30.48 | 32.80 | 32.86 | 31.83 | 32.60 |
| 2 | 380x380 | 58.59 | 34.12 | 31.92 | 33.02 | 33.9 |
| 4 | 380x380 | 111.35 | 35.92 | 35.0 | 35.12 | 35.68 |
| 8 | 380x380 | 199.00 | 40.24 | 38.72 | 39.04 | 40.0 |
| 32 | 380x380 | 307.04 | 104.0 | 104.0 | 104.0 | 104.0 |
To achieve these same results, follow the steps in the Quick Start Guide.
Release notes
Changelog
March 2021
- Initial release
Known issues
- EfficientNet-B0 does not improve training speed by using AMP as compared to FP32, because of the CPU bound Auto-augmentation.